LROC NAC Digital Terrain Models (DTM) are made from geometric stereo pairs (two images of the same area on the ground, taken from different view angles under nearly the same illumination). LROC was not designed as a stereo system, but can obtain stereo pairs through images acquired from two orbits (with at least one off-nadir slew). Off- nadir rolls interfere with the data collection of the other instruments, so LROC slew opportunities are limited to four per day. Due to the time-intensive process, not all of the stereo pairs have been made into DTMs.
To generate a DTM, we use a combination of the USGS Integrated Software for Imagers and Spectrometers (ISIS) and SOCET SET from BAE Systems. ISIS routines ingest the image files, perform a radiometric correction, and export to a format SOCET SET accepts. The files imported into SOCET SET are Level 1 radiometrically corrected NAC images and a list of keywords of relevant parameters, such as spacecraft coordinates, altitude, Euler angles, and ephemeris positions.
SOCET SET uses a generic pushbroom sensor model to relate the image space to ground coordinates. Often times, there is a bias error in the camera pointing, which we correct with multi-sensor triangulation (MST), more commonly known as bundle adjustment, to update the parameters (position, velocity, pointing angles, etc.) and improve the registration between overlapping images and between images and ground truth. MST performs an aero-triangulation using sensor position, sensor pointing, ground points, and image tie points. Ground points tie a point or identifiable object in the image to a point on the ground, and tie points relate a point in the overlap regions of two or more images. Selected parameters, such as the position, velocity, and pointing angles are adjusted so that the residual RMS for all ground and tie point measurements is minimized.
Once MST completes with an acceptable residual RMS, the process of extracting DTMs can begin with NGATE (SOCET SET - Next Generation Automatic Terrain Extraction). NGATE performs image correlation and edge matching for every single pixel in the image to create a dense model. The result is then re-sampled to the desired DTM resolution (meters/post) that can be anywhere between 3 to 10 times the pixel scale of the image to minimize noise.
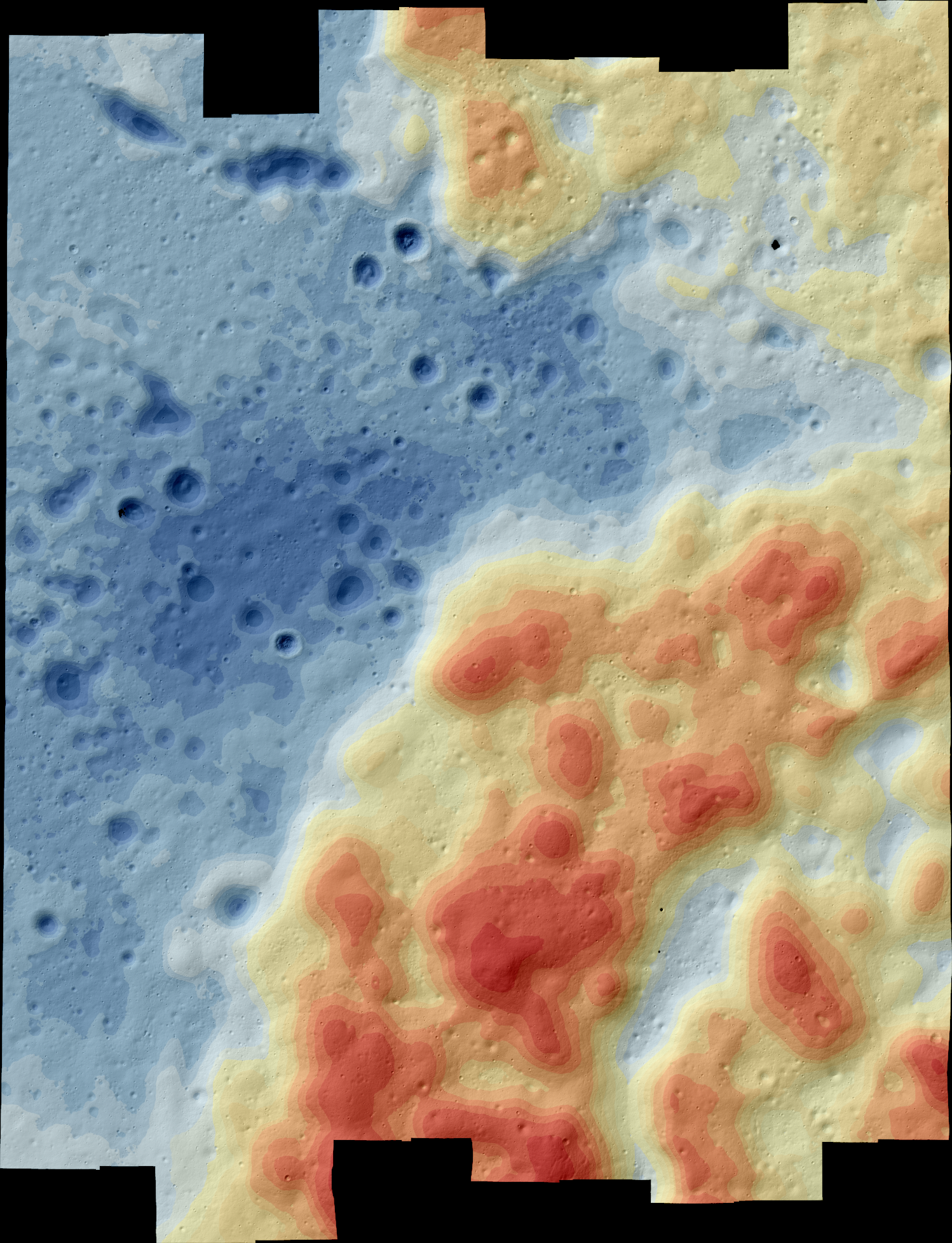
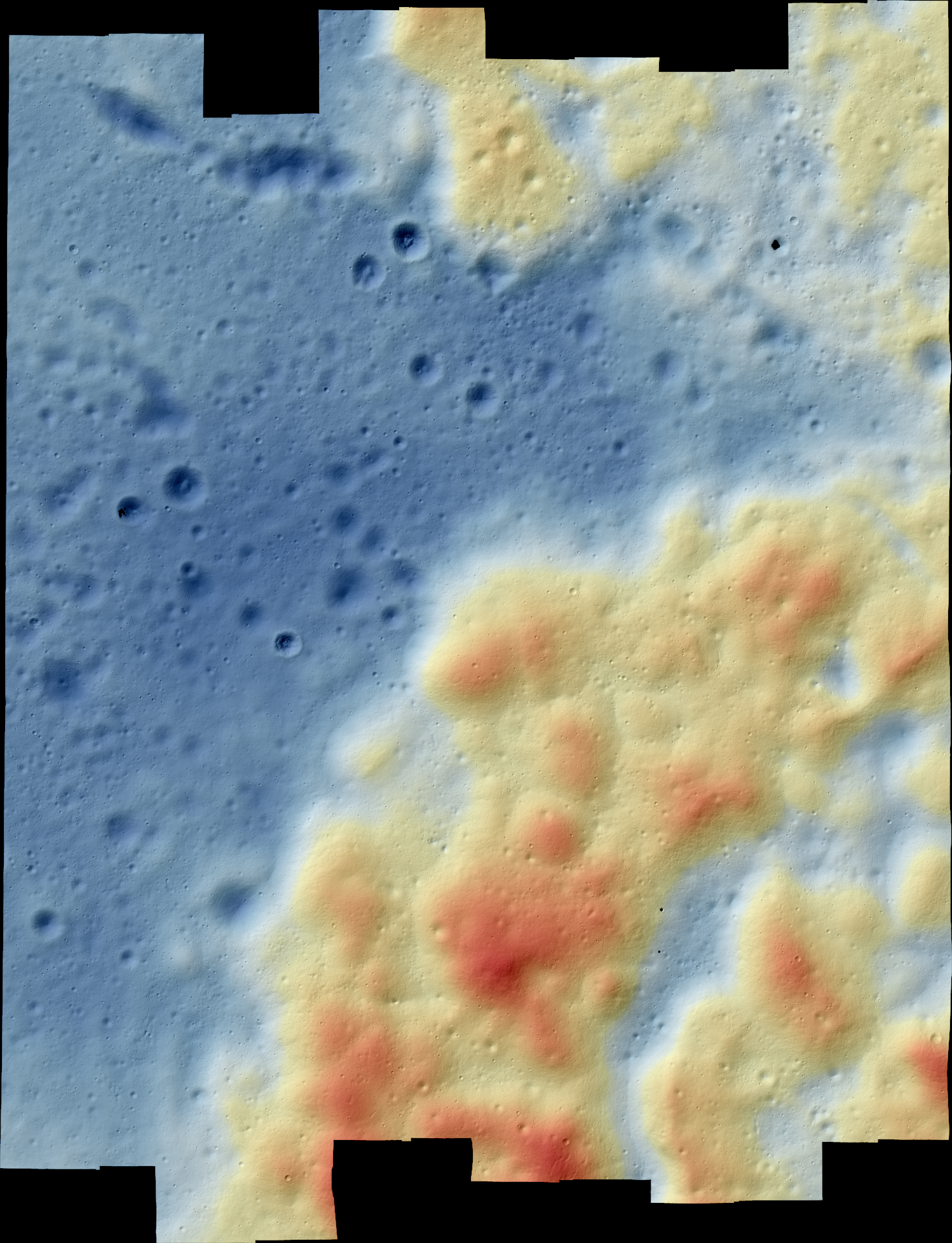
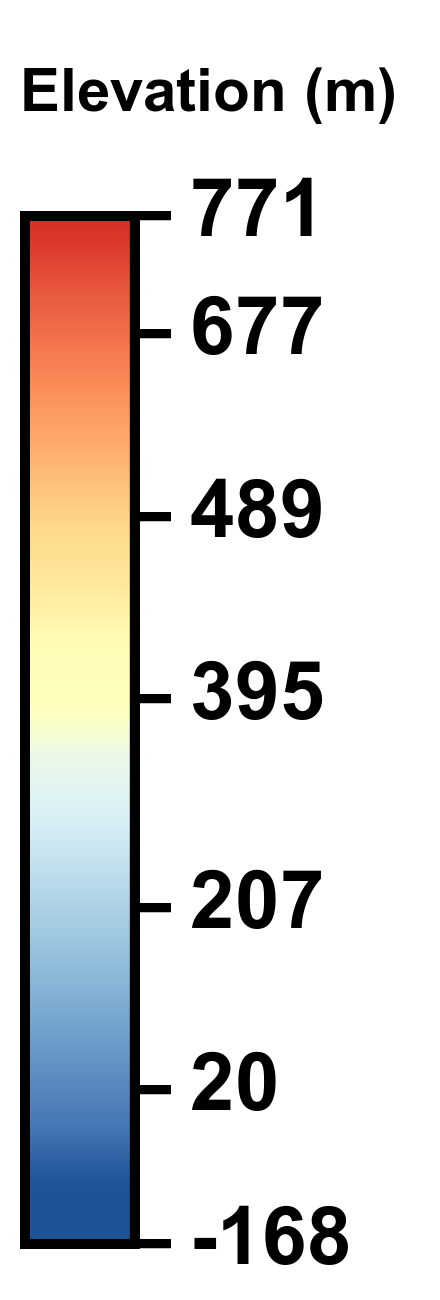
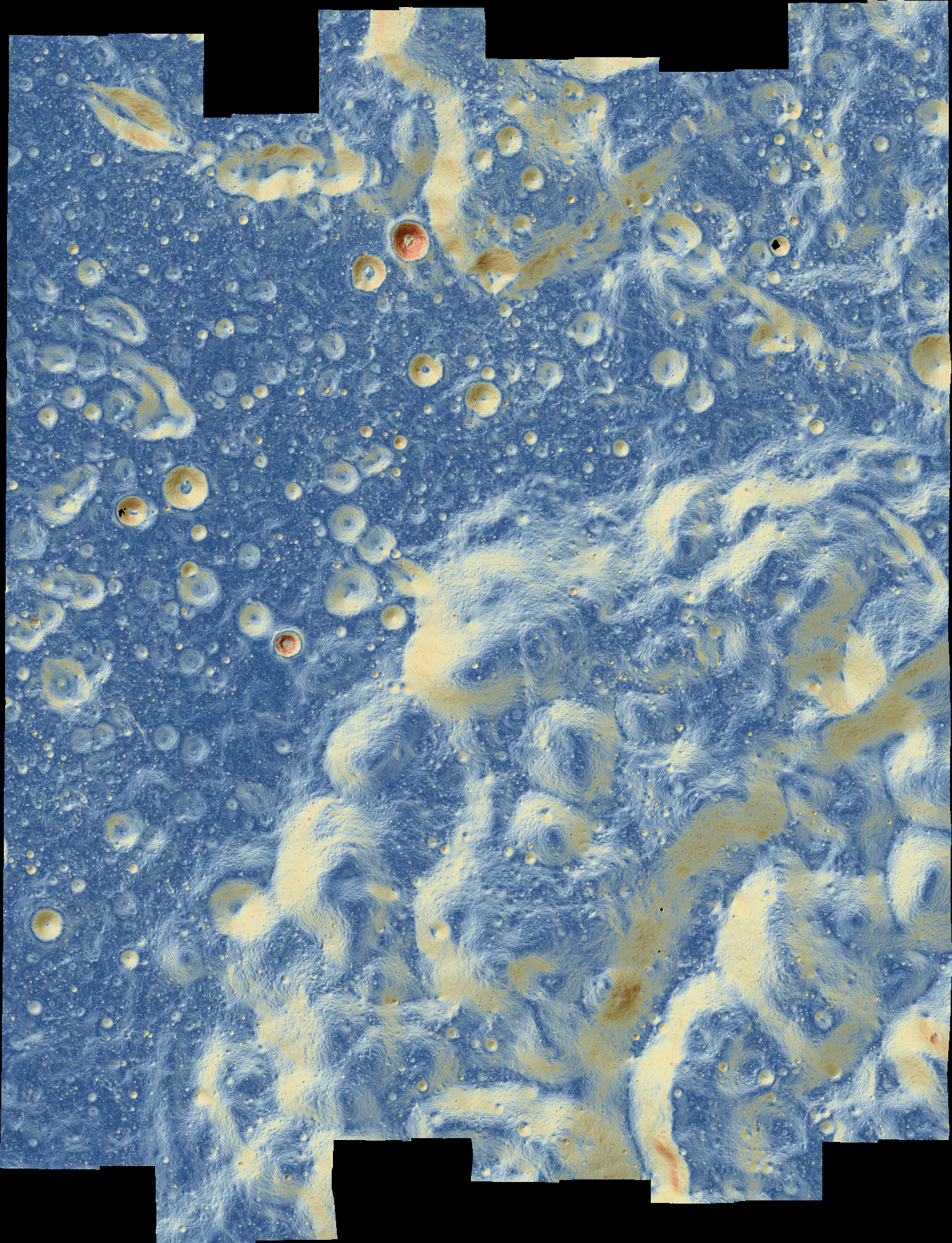
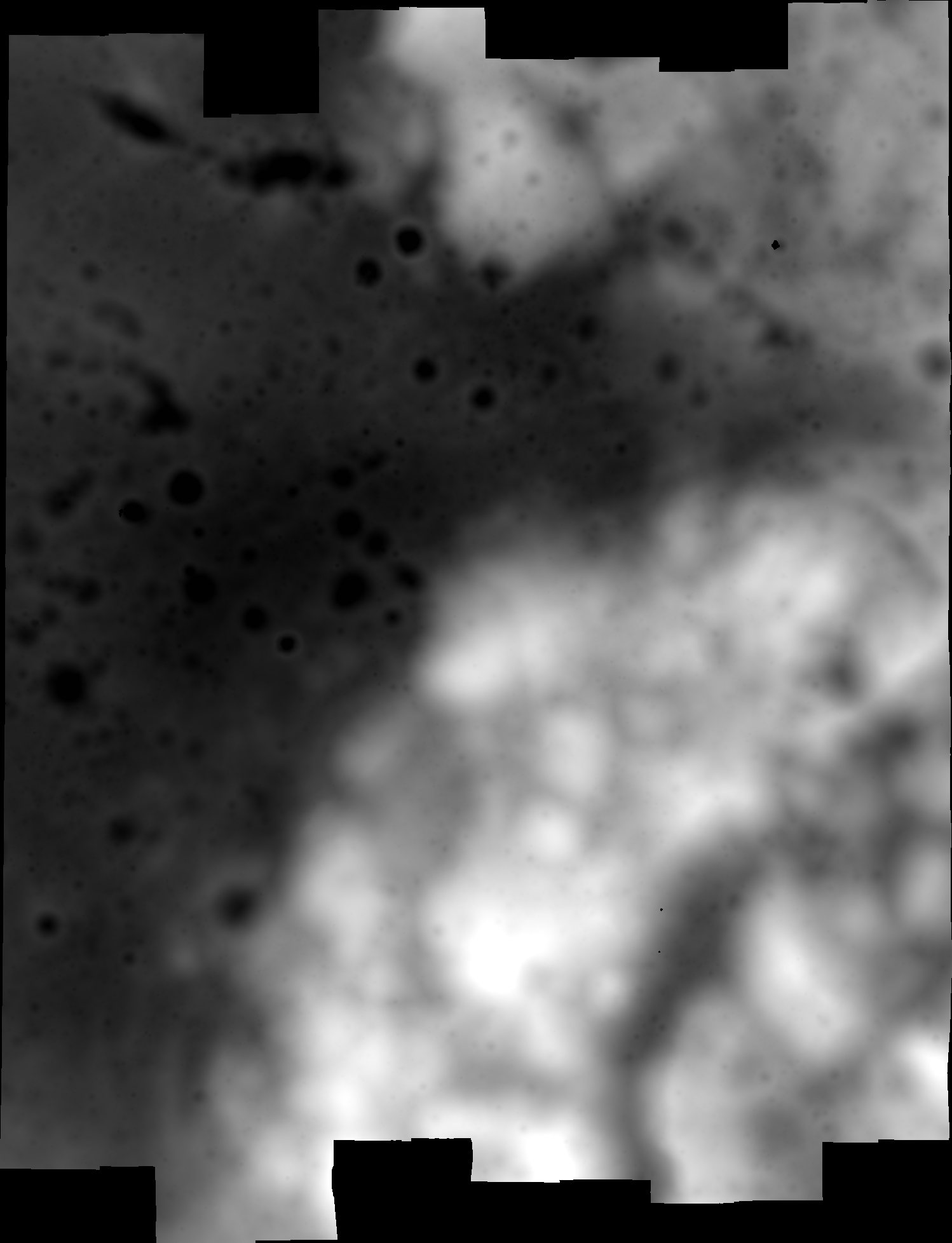
Once we have the DTM, we make the following derived products: orthorectified image, shaded- relief image, two color shaded relief images, color slope map, and confidence map. An orthorectified image has all topographical and camera distortions removed. These images are cartographically true and can be used to measure accurate distances. A shaded-relief generated using the DTM simulates the Moon's surface with a light source casting shadows on the terrain. Color-coded elevations are draped on the shaded-relief to create the color shaded relief maps. The discrete color shaded relief map has been binned to emphasize topographic details, while the gradient color shade relief has a continous color coding. Finally, slopes derived from the DTM are color-coded. A confidence map indicates the quality of the elevation estimate at each pixel. Refer to the readme file for the description of the pixel values.
The DTM, orthorectified images, are archived as standard PDS products in two resolutions (resolution of the DTM and resolution of the original images), and the confidence map. The shaded-relief, color shaded-reliefs, color slope map, and DTM are in GeoTIFF format.
For more information on the methodology and error analysis of the DTMs, see Henriksen et al. 2016 [1].
[1] M.R. Henriksen, M.R. Manheim, K.N. Burns, P. Seymour, E.J. Speyerer, A. Deran, A.K. Boyd, E. Howington-Kraus, M.R. Rosiek, B.A. Archinal, and M.S. Robinson. Extracting accurate and precise topography from LROC narrow angle camera stereo observations. Icarus (2016). http://dx.doi.org/10.1016/j.icarus.2016.05.012
| PDS Name | APOLLO16 |
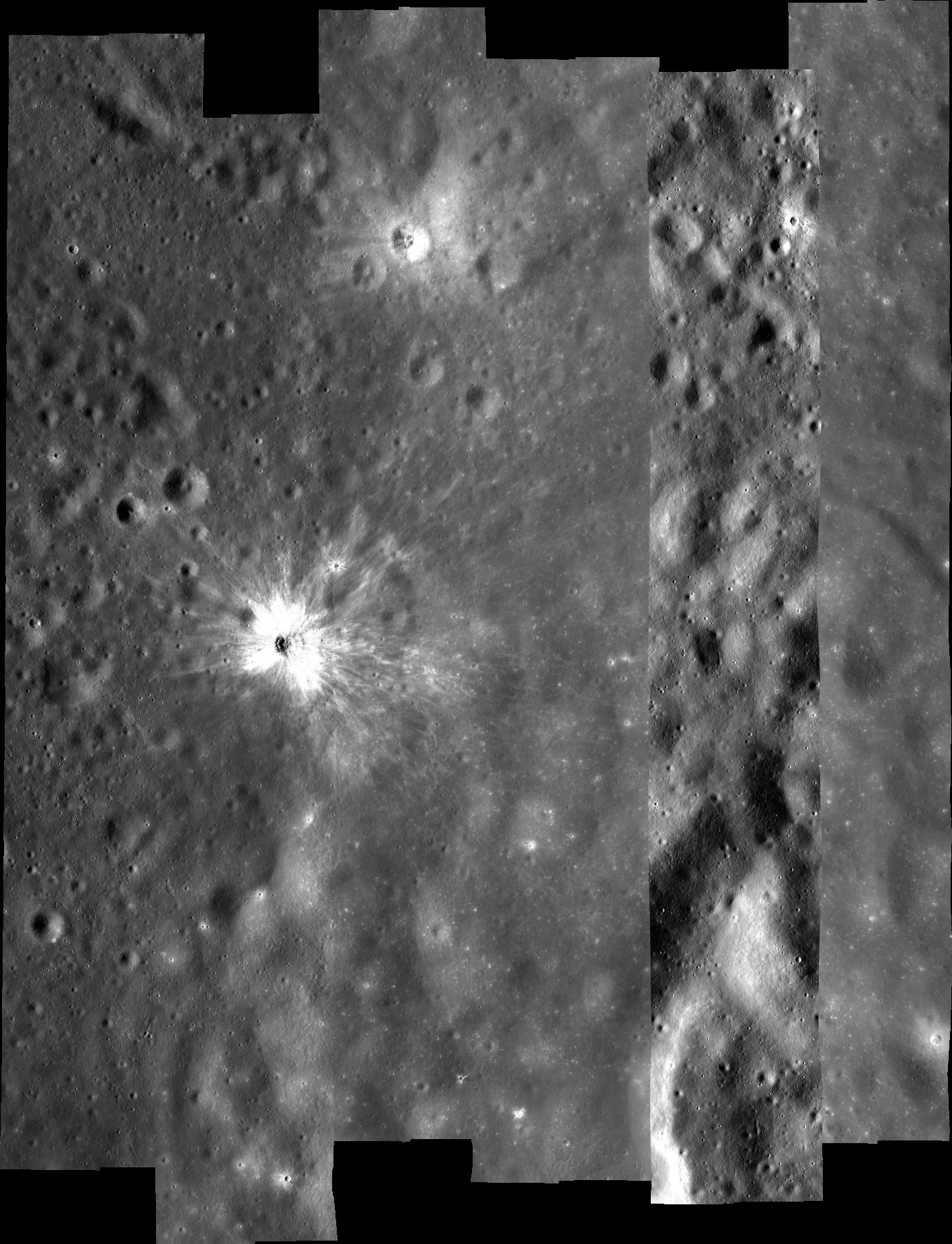
| Site Name | Apollo 16 Landing Site |
| Center Lat | -9.0 |
| Center Lon | 15.5 |
| Pixel Scale | 2 m/px |
| Relative LE | 0.88 |
| LOLA_RMS | 1.02 |
| Number of Profiles | 35 |
| Project Date | 2013-10-02 |
| Image Start Time (UTC) | 2010-02-02 12:47:20.393+00 |
| Image Stop Time (UTC) | 2010-02-02 12:47:38.103+00 |
| Images | |
| Images in this DTM mosaic are listed in order of layering from back to front: | |
| M119754107 L/R | |
| M119747321 L/R | |
| M135087320 L/R | |
| M135094104 L/R | |
| M137441791 L/R | |
| M137448575 L/R | |
| M152770233 L/R | |
| M152777016 L/R | |
| M159840546 L/R | |
| M159847331 L/R | |
| M165748030 L/R | |
| M165741245 L/R | |
| Key Features | |
| Highland | |
| Anthropogenic | |
| Minimum Latitude | -9.65 |
| Maximum Latitude | -8.61 |
| Minimum Longitude | 15.14 |
| Maximum Longitude | 15.94 |
Links to Low Resolution Browse PNGs
Discrete Colorshade
Discrete Colorshade Legend
Gradient Colorshade
Gradient Colorshade Legend
Slopeshade
Slopeshade Legend
Confidence Map
Digital Terrain Model
Orthophoto MOSAIC - 2.00 m
Orthophoto MOSAIC - 0.50 m
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Apollo 16 Landing Site DTM
Discrete Colorshade (click for more information)
Extra Downloads
Downloads
Supplemental Downloads
Component Products